Warehouse Automation Project
Developed as part of Robotics Masterclass ROS2 Navigation Course, the project demonstrates advanced autonomous navigation capabilities using the RB1 mobile robot by Robotnik. The system showcases a complete warehouse automation solution that leverages the ROS 2 Nav2 stack for autonomous navigation and task execution in both simulated and real environments.
Key Features
-
Autonomous Localization & Navigation: Powered by the ROS 2 Nav2 framework, the AMR achieves robust self-localization using AMCL and performs real-time path planning with dynamic obstacle avoidance. It follows precise trajectories and continuously replans routes in response to environmental changes, ensuring smooth and efficient movement throughout the warehouse.
-
Task Management: Integrates the Nav2 Simple Commander API to coordinate multi-step task sequences, such as navigating between zones, picking up or dropping shelves, and returning to the base station.
-
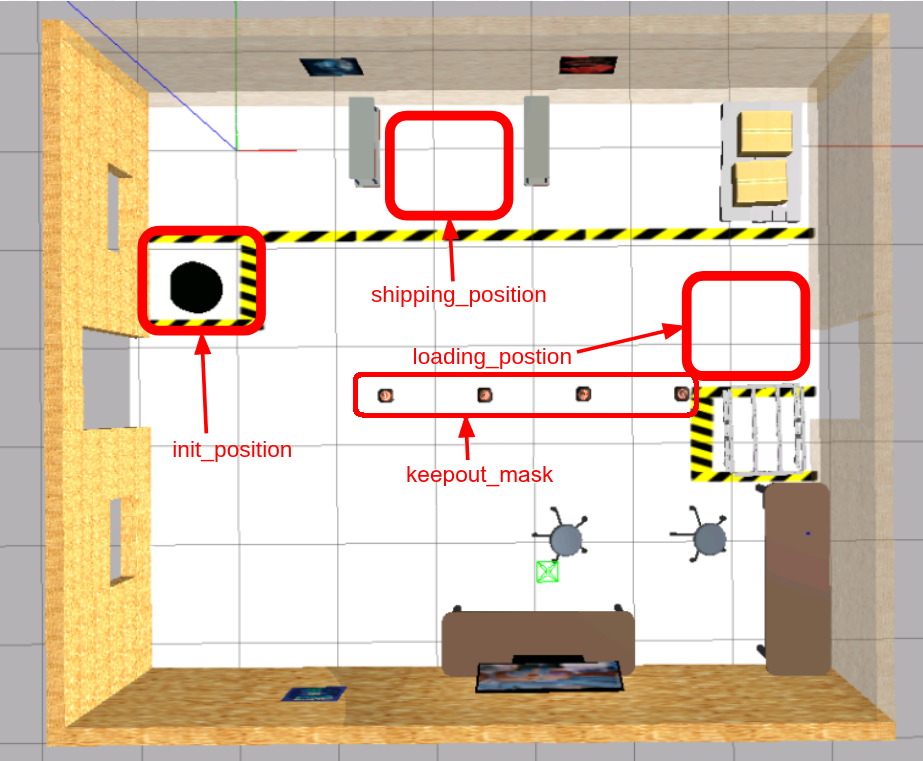
Automated Warehouse Operations: Executes warehouse workflows — including navigation to loading/unloading areas, shelf manipulation with the lift mechanism, and safe transport along designated paths. The robot performs all operations autonomously, reducing manual intervention and improving process consistency.
- Flexible Deployment: Designed with a flexible ROS 2 modular structure, allowing for easy integration of new sensors, custom warehouse maps, and scalable expansion to multi-robot systems or larger facilities.
The project maintains two implementations:
- A thoroughly tested Gazebo simulation environment
- A real-world deployment setup, ran remotely connected to the The Construct’s warehouse
Both setups utilize identical control logic while accounting for their specific environmental characteristics and constraints.