A 6-DOF robot arm programmed to manipulate cup from counter to delivery robot tray cup hole using Moveit2 planning
C++PythonROS2Moveit2PCLOpencvBTGazeboDocker
Coursera Self-Driving Car Specialization key outcomes of the courses
Autonomous CarPath PlanningCNNSensor FusionPID ControlCARLA Sim
RB1, an AMR demonstrating robotics can streamline warehouse logistics — autonomously localizing, navigating, and transporting shelves
ROS2Nav2PythonLiDAR
Fastbot, a versatile mobile robot platform assembled and ready for ROS 2 development
Raspberry Pi 4ArduinoROS 2Python / C++LiDARRasPi CameraDocker
ORB-SLAM3 tested on Kitti dataset using ROS Noetic with package helpers
ROSCMakeVisual SLAMKittiPangolin
A maze solver robot project. The robot navigates using PID controller to follow waypoints, and sensor feedback for wall avoidance and course correction
C++ROS2PID ControlGazeboHolonomic RobotLiDAR
A web application that connects to a ROS2 robot system, allowing users to control and monitor a simulated robot through an interactive interface
ROS2Nav2GazeboJS
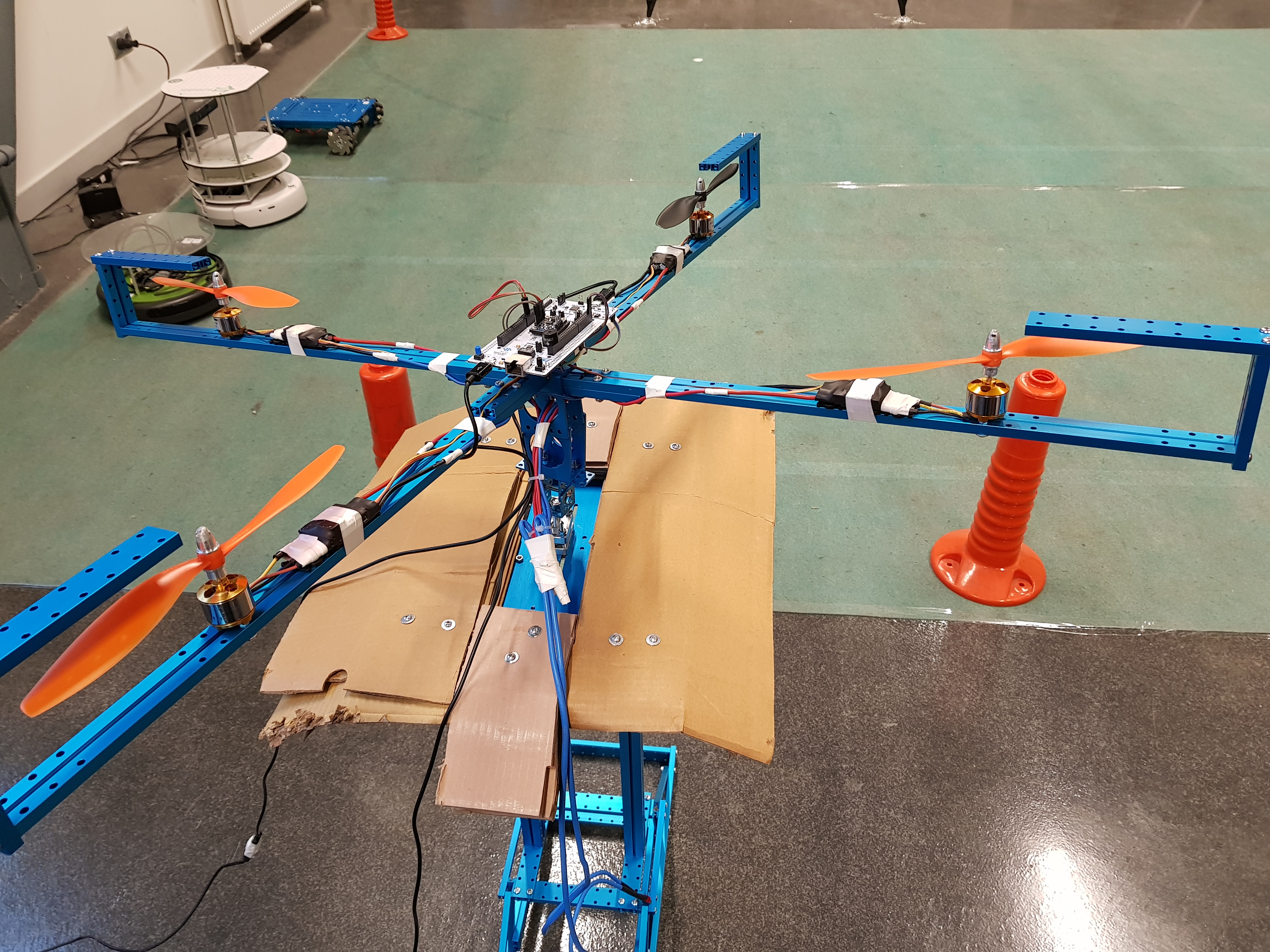
Bare-metal PID angle controller implementation on STM32 for quadrotor test system
CEmbeddedPID ControllerSTM32KeilROSPython